.svg)
Statistical Process Control (SPC)
Understanding Statistical Process Control Fundamentals
SPC is based on the principle that all processes exhibit natural variation, and by understanding and controlling this variation, manufacturers can maintain consistent quality and identify when processes deviate from their normal operating conditions. The methodology distinguishes between common cause variation (inherent in the process) and special cause variation (due to specific, identifiable factors).
Unlike simple quality inspection, SPC provides a proactive approach to quality management by monitoring processes in real-time and identifying trends and patterns that may indicate potential quality issues before they result in defective products.
Core Components of SPC
Control Charts
The primary tool for monitoring process variation and detecting out-of-control conditions:
class ControlChart:
def __init__(self, chart_type, specification_limits):
self.chart_type = chart_type
self.specification_limits = specification_limits
self.data_points = []
self.control_limits = None
self.center_line = None
self.violation_rules = ViolationRules()
def calculate_control_limits(self, historical_data):
"""Calculate control limits based on historical data"""
if self.chart_type == 'X_BAR':
self.center_line = np.mean(historical_data)
std_dev = np.std(historical_data)
self.control_limits = {
'UCL': self.center_line + 3 * std_dev,
'LCL': self.center_line - 3 * std_dev
}
elif self.chart_type == 'R_CHART':
self.center_line = np.mean(historical_data)
self.control_limits = {
'UCL': self.center_line * 2.114, # D4 constant for n=5
'LCL': self.center_line * 0 # D3 constant for n=5
}
elif self.chart_type == 'P_CHART':
self.center_line = np.mean(historical_data)
std_dev = np.sqrt(self.center_line * (1 - self.center_line) / np.mean([len(x) for x in historical_data]))
self.control_limits = {
'UCL': self.center_line + 3 * std_dev,
'LCL': max(0, self.center_line - 3 * std_dev)
}
def add_data_point(self, value, timestamp):
"""Add new data point and check for violations"""
data_point = DataPoint(value, timestamp)
self.data_points.append(data_point)
# Check for control violations
violations = self.check_control_violations(data_point)
if violations:
self.handle_control_violations(violations)
return violations
def check_control_violations(self, data_point):
"""Check for various control chart violations"""
violations = []
# Rule 1: Point beyond control limits
if (data_point.value > self.control_limits['UCL'] or
data_point.value < self.control_limits['LCL']):
violations.append(ControlViolation('BEYOND_LIMITS', data_point))
# Rule 2: Seven consecutive points on same side of center line
if len(self.data_points) >= 7:
last_seven = self.data_points[-7:]
if all(p.value > self.center_line for p in last_seven) or \
all(p.value < self.center_line for p in last_seven):
violations.append(ControlViolation('SEVEN_CONSECUTIVE', data_point))
# Rule 3: Seven consecutive points trending up or down
if len(self.data_points) >= 7:
last_seven = self.data_points[-7:]
if self.is_trending_up(last_seven) or self.is_trending_down(last_seven):
violations.append(ControlViolation('TRENDING', data_point))
return violationsProcess Capability Analysis
Assessing the ability of a process to produce products within specifications:
class ProcessCapabilityAnalyzer:
def __init__(self, specification_limits):
self.specification_limits = specification_limits
self.capability_calculator = CapabilityCalculator()
self.performance_calculator = PerformanceCalculator()
def analyze_process_capability(self, process_data):
"""Analyze process capability and performance"""
# Calculate basic statistics
mean = np.mean(process_data)
std_dev = np.std(process_data)
# Calculate capability indices
capability_indices = self.calculate_capability_indices(
mean, std_dev, self.specification_limits
)
# Calculate performance indices
performance_indices = self.calculate_performance_indices(
process_data, self.specification_limits
)
# Generate capability report
capability_report = CapabilityReport(
mean=mean,
std_dev=std_dev,
capability_indices=capability_indices,
performance_indices=performance_indices,
specification_limits=self.specification_limits
)
return capability_report
def calculate_capability_indices(self, mean, std_dev, spec_limits):
"""Calculate Cp, Cpk, and other capability indices"""
# Cp - Potential capability
cp = (spec_limits['USL'] - spec_limits['LSL']) / (6 * std_dev)
# Cpk - Actual capability
cpu = (spec_limits['USL'] - mean) / (3 * std_dev)
cpl = (mean - spec_limits['LSL']) / (3 * std_dev)
cpk = min(cpu, cpl)
# Cpm - Capability relative to target
if 'TARGET' in spec_limits:
target = spec_limits['TARGET']
cpm = (spec_limits['USL'] - spec_limits['LSL']) / \
(6 * np.sqrt(std_dev**2 + (mean - target)**2))
else:
cpm = None
return {
'Cp': cp,
'Cpk': cpk,
'Cpu': cpu,
'Cpl': cpl,
'Cpm': cpm
}Sampling and Measurement Systems
Implementing systematic sampling strategies for SPC:
class SPCSamplingManager:
def __init__(self, sampling_config, measurement_systems):
self.sampling_config = sampling_config
self.measurement_systems = measurement_systems
self.sampling_scheduler = SamplingScheduler()
self.measurement_validator = MeasurementValidator()
def execute_sampling_plan(self, production_data):
"""Execute sampling plan for SPC monitoring"""
sampling_results = []
for sampling_point in self.sampling_config.sampling_points:
# Determine sample size and frequency
sample_size = self.determine_sample_size(sampling_point)
sampling_frequency = self.determine_sampling_frequency(sampling_point)
# Collect samples
samples = self.collect_samples(
production_data, sampling_point, sample_size
)
# Validate measurements
validated_samples = []
for sample in samples:
if self.measurement_validator.validate_measurement(sample):
validated_samples.append(sample)
else:
self.handle_invalid_measurement(sample)
# Calculate subgroup statistics
subgroup_stats = self.calculate_subgroup_statistics(validated_samples)
sampling_results.append({
'sampling_point': sampling_point,
'samples': validated_samples,
'subgroup_stats': subgroup_stats,
'timestamp': time.time()
})
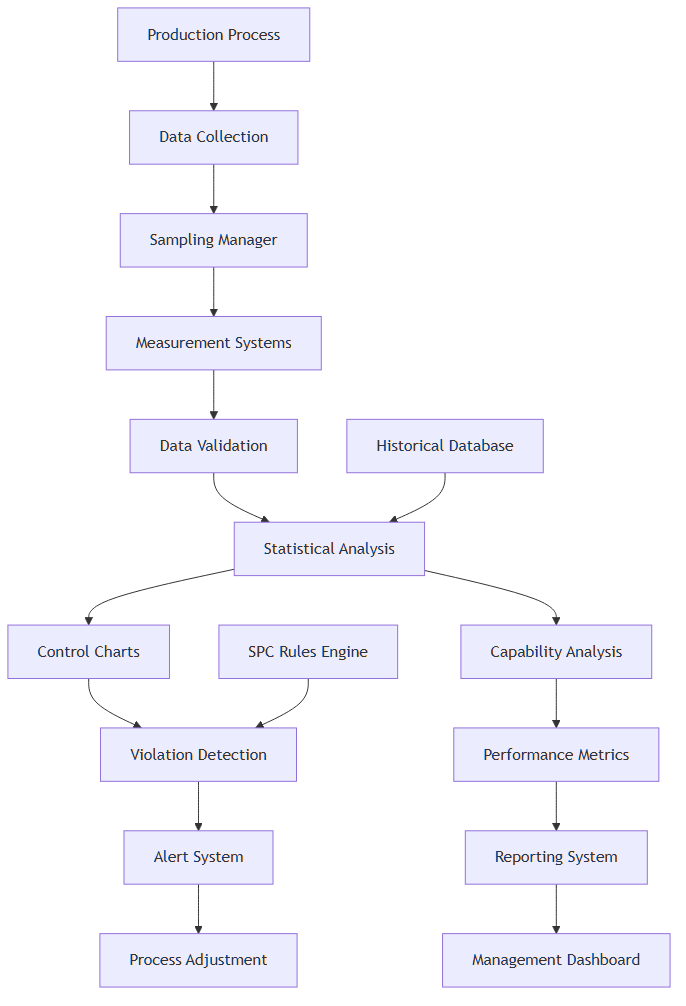
return sampling_resultsSPC Implementation Architecture
Advanced SPC Techniques
Multivariate Statistical Process Control
Monitoring multiple process variables simultaneously:
class MultivariateSPC:
def __init__(self, variables, correlation_matrix):
self.variables = variables
self.correlation_matrix = correlation_matrix
self.hotelling_t2 = HotellingT2()
self.pca_analyzer = PCAAnalyzer()
def monitor_multivariate_process(self, multivariate_data):
"""Monitor process using multivariate control charts"""
# Calculate Hotelling's T² statistic
t2_values = []
for data_point in multivariate_data:
t2_value = self.hotelling_t2.calculate_t2(data_point, self.correlation_matrix)
t2_values.append(t2_value)
# Check for out-of-control conditions
control_limit = self.hotelling_t2.calculate_control_limit(
len(self.variables), len(multivariate_data)
)
violations = []
for i, t2_value in enumerate(t2_values):
if t2_value > control_limit:
violations.append(MultivariateViolation(i, t2_value, control_limit))
# Perform principal component analysis
pca_results = self.pca_analyzer.analyze_components(multivariate_data)
return {
't2_values': t2_values,
'control_limit': control_limit,
'violations': violations,
'pca_results': pca_results
}Adaptive Control Limits
Implementing adaptive control limits for non-stationary processes:
class AdaptiveControlLimits:
def __init__(self, adaptation_algorithm, update_frequency):
self.adaptation_algorithm = adaptation_algorithm
self.update_frequency = update_frequency
self.control_limits_history = []
self.process_model = ProcessModel()
def update_control_limits(self, recent_data, current_limits):
"""Update control limits based on recent process behavior"""
# Analyze recent process behavior
process_analysis = self.process_model.analyze_process_behavior(recent_data)
# Determine if adaptation is needed
if self.adaptation_algorithm.should_adapt(process_analysis, current_limits):
# Calculate new control limits
new_limits = self.adaptation_algorithm.calculate_new_limits(
recent_data, process_analysis
)
# Validate new limits
if self.validate_new_limits(new_limits, current_limits):
# Update control limits
self.control_limits_history.append({
'timestamp': time.time(),
'old_limits': current_limits,
'new_limits': new_limits,
'reason': process_analysis.adaptation_reason
})
return new_limits
return current_limitsReal-time SPC Implementation
Implementing real-time SPC monitoring:
class RealTimeSPC:
def __init__(self, control_charts, alert_system):
self.control_charts = control_charts
self.alert_system = alert_system
self.data_stream_processor = DataStreamProcessor()
self.violation_detector = ViolationDetector()
def process_real_time_data(self, data_stream):
"""Process real-time data for SPC monitoring"""
for data_point in data_stream:
# Process data point through relevant control charts
for chart_name, chart in self.control_charts.items():
if chart.applies_to_data(data_point):
# Add data point to chart
violations = chart.add_data_point(
data_point.value, data_point.timestamp
)
# Handle violations immediately
if violations:
self.handle_real_time_violations(
chart_name, violations, data_point
)
# Update real-time dashboard
self.update_real_time_dashboard(chart_name, chart, data_point)
def handle_real_time_violations(self, chart_name, violations, data_point):
"""Handle control chart violations in real-time"""
for violation in violations:
# Create alert
alert = self.alert_system.create_spc_alert(
chart_name, violation, data_point
)
# Send immediate notification
self.alert_system.send_immediate_alert(alert)
# Log violation
self.log_spc_violation(chart_name, violation, data_point)
# Trigger corrective action if configured
if violation.severity == 'CRITICAL':
self.trigger_corrective_action(chart_name, violation)Applications in Industrial Operations
Manufacturing Quality Control
Implementing SPC for manufacturing quality management:
class ManufacturingQualitySPC:
def __init__(self, quality_characteristics, inspection_points):
self.quality_characteristics = quality_characteristics
self.inspection_points = inspection_points
self.control_charts = {}
self.capability_analyzer = ProcessCapabilityAnalyzer()
def implement_manufacturing_spc(self, production_data):
"""Implement SPC for manufacturing quality control"""
spc_results = {}
for characteristic in self.quality_characteristics:
# Create control chart for characteristic
control_chart = self.create_control_chart(characteristic)
# Extract relevant data
characteristic_data = self.extract_characteristic_data(
production_data, characteristic
)
# Calculate control limits
control_chart.calculate_control_limits(characteristic_data)
# Monitor current production
current_violations = []
for data_point in characteristic_data:
violations = control_chart.add_data_point(
data_point.value, data_point.timestamp
)
current_violations.extend(violations)
# Analyze process capability
capability_analysis = self.capability_analyzer.analyze_process_capability(
[dp.value for dp in characteristic_data]
)
spc_results[characteristic.name] = {
'control_chart': control_chart,
'violations': current_violations,
'capability_analysis': capability_analysis
}
return spc_resultsProcess Improvement and Optimization
Using SPC for continuous process improvement:
class ProcessImprovementSPC:
def __init__(self, improvement_methodology):
self.improvement_methodology = improvement_methodology
self.variation_analyzer = VariationAnalyzer()
self.improvement_tracker = ImprovementTracker()
def analyze_process_improvement_opportunities(self, spc_data):
"""Analyze SPC data for process improvement opportunities"""
# Analyze sources of variation
variation_analysis = self.variation_analyzer.analyze_variation_sources(
spc_data
)
# Identify improvement opportunities
improvement_opportunities = []
# Check for chronic problems
chronic_problems = self.identify_chronic_problems(spc_data)
for problem in chronic_problems:
opportunity = ImprovementOpportunity(
type='CHRONIC_PROBLEM',
description=problem.description,
potential_impact=problem.impact,
recommended_actions=problem.recommended_actions
)
improvement_opportunities.append(opportunity)
# Check for process capability issues
capability_issues = self.identify_capability_issues(spc_data)
for issue in capability_issues:
opportunity = ImprovementOpportunity(
type='CAPABILITY_ISSUE',
description=issue.description,
potential_impact=issue.impact,
recommended_actions=issue.recommended_actions
)
improvement_opportunities.append(opportunity)
return {
'variation_analysis': variation_analysis,
'improvement_opportunities': improvement_opportunities,
'priority_ranking': self.rank_improvement_opportunities(
improvement_opportunities
)
}Best Practices for SPC Implementation
1. Establish Proper Sampling Strategies
Implement systematic sampling that represents the process:
class SPCSamplingStrategy:
def __init__(self, process_characteristics):
self.process_characteristics = process_characteristics
self.sampling_optimizer = SamplingOptimizer()
self.cost_calculator = CostCalculator()
def optimize_sampling_strategy(self, quality_requirements, cost_constraints):
"""Optimize sampling strategy for SPC"""
# Calculate optimal sample size
optimal_sample_size = self.sampling_optimizer.calculate_optimal_sample_size(
quality_requirements, self.process_characteristics
)
# Calculate optimal sampling frequency
optimal_frequency = self.sampling_optimizer.calculate_optimal_frequency(
quality_requirements, cost_constraints
)
# Determine sampling locations
optimal_locations = self.sampling_optimizer.determine_sampling_locations(
self.process_characteristics
)
return SamplingStrategy(
sample_size=optimal_sample_size,
frequency=optimal_frequency,
locations=optimal_locations
)2. Implement Proper Training and Procedures
Ensure proper training for SPC implementation:
class SPCTrainingManager:
def __init__(self, training_modules, competency_requirements):
self.training_modules = training_modules
self.competency_requirements = competency_requirements
self.training_tracker = TrainingTracker()
self.competency_assessor = CompetencyAssessor()
def manage_spc_training(self, personnel):
"""Manage SPC training for personnel"""
training_results = {}
for person in personnel:
# Assess current competency
current_competency = self.competency_assessor.assess_competency(
person, self.competency_requirements
)
# Identify training needs
training_needs = self.identify_training_needs(
current_competency, self.competency_requirements
)
# Develop training plan
training_plan = self.develop_training_plan(training_needs)
# Track training progress
self.training_tracker.track_training_progress(person, training_plan)
training_results[person.id] = {
'current_competency': current_competency,
'training_needs': training_needs,
'training_plan': training_plan
}
return training_results3. Integrate with Manufacturing Systems
Integrate SPC with existing manufacturing systems:
class SPCSystemIntegration:
def __init__(self, manufacturing_systems, spc_system):
self.manufacturing_systems = manufacturing_systems
self.spc_system = spc_system
self.data_integrator = DataIntegrator()
self.workflow_integrator = WorkflowIntegrator()
def integrate_spc_with_manufacturing(self):
"""Integrate SPC with manufacturing systems"""
# Integrate data flows
data_integration = self.data_integrator.integrate_data_flows(
self.manufacturing_systems, self.spc_system
)
# Integrate workflows
workflow_integration = self.workflow_integrator.integrate_workflows(
self.manufacturing_systems, self.spc_system
)
# Configure automated responses
automated_responses = self.configure_automated_responses()
return {
'data_integration': data_integration,
'workflow_integration': workflow_integration,
'automated_responses': automated_responses
}SPC Reporting and Visualization
SPC Dashboard Implementation
Creating effective SPC dashboards:
class SPCDashboard:
def __init__(self, control_charts, capability_reports):
self.control_charts = control_charts
self.capability_reports = capability_reports
self.dashboard_generator = DashboardGenerator()
self.alert_integrator = AlertIntegrator()
def generate_spc_dashboard(self, time_period):
"""Generate comprehensive SPC dashboard"""
dashboard_elements = []
# Create control chart visualizations
for chart_name, chart in self.control_charts.items():
chart_visualization = self.dashboard_generator.create_control_chart_viz(
chart, time_period
)
dashboard_elements.append(chart_visualization)
# Create capability summaries
capability_summary = self.dashboard_generator.create_capability_summary(
self.capability_reports
)
dashboard_elements.append(capability_summary)
# Create violation alerts
violation_alerts = self.alert_integrator.get_recent_violations(time_period)
dashboard_elements.append(violation_alerts)
# Create performance metrics
performance_metrics = self.generate_performance_metrics(time_period)
dashboard_elements.append(performance_metrics)
return self.dashboard_generator.assemble_dashboard(dashboard_elements)Challenges and Solutions
Data Quality and Measurement System Analysis
Ensuring measurement system capability supports SPC requirements.
Process Variation Sources
Identifying and controlling sources of process variation.
Operator Training and Engagement
Ensuring operators understand and properly use SPC tools.
Integration with Existing Systems
Integrating SPC with existing manufacturing and quality systems.
Related Concepts
Statistical Process Control integrates closely with manufacturing intelligence, operational analytics, and industrial automation. It supports predictive maintenance, real-time analytics, and industrial data processing by providing statistical methods for quality control and process optimization.
Modern SPC implementations increasingly leverage machine learning, artificial intelligence, and cloud-native architectures to create more intelligent and adaptive quality control systems.